![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)
The wide application of geographic information system (GIS) and global positioning system (GPS) makes people enjoy many conveniences brought by location-based services. Traditional G IS uses maps as the main method of visualization. However, 70% of human access to information comes from vision. Therefore, the combination of geographic location information and video information can enrich the content of G IS and generate many new applications. Sites such as Microsoft ’s Windows Local Live and Image City Wuhan have launched live maps one after another, allowing people to understand each city intuitively, comprehensively and conveniently on the Internet. The combination of GPS information and video information is also conducive to 3D modeling of geographic information systems. For example, the 3DV ideoG IS software launched by the Iwagen Research Institute in Japan can automatically generate panoramic video images with positioning information taken on land and in the air. Corresponding highly realistic 3D scene model.
In order to address these application requirements, this paper proposes an integrated data acquisition transmitter for video, audio and positioning information.
This collector can not only provide a more natural, more realistic, and more timely geographic information system environment through live webcasting, the collected data can provide material for the construction of real maps and 3D scene maps, and can also realize video and audio based on positioning information Data segmentation and retrieval.
1 Overall system solutionIn order to achieve the high-quality positioning video and audio compression collection of the collector, real-time positioning video and audio transmission, and low power consumption and portability, the system uses TI's TMS320DM642 as the main control chip of the collector. DM642 is a high-performance fixed-point DSP in the TMS320C6000 family dedicated to multimedia applications launched by TI. It has 8 parallel operators, 3 dedicated video and 2 audio multiplexing interfaces, and integrates 10 / 100Mbit / s Ethernet MAC. These advantages of the chip are very suitable for the collection, compression and transmission of video and audio information.
Figure 1 shows the hardware block diagram of the collector. GPS positioning data is read in by the TL16C752B through the serial port; the audio signal is quantized and sampled by the TLV320A IC23B at 8 kH z, 16 bits; the video signal is collected by the TVP5150. The positioning data that enters DM642 is encoded by H.264 video encoding at a low bit rate and synchronously synthesized with the audio encoding signal of G. 723, and then sent to a remote server through a wireless network. The other channel is encoded at a high bit rate and stored to 2.5 inches. hard disk.
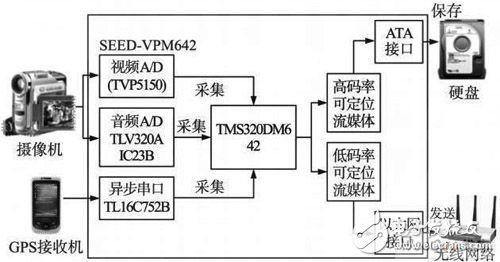
Figure 1 Collector hardware block diagram
2 System hardware design2. 1 Video signal collection
The video signal acquisition is shown in Figure 2. SCLK is the clock, GPCL is the enable signal, and Yout is the 8-bit BT.656 signal. In the system, the VP0 of DM642 is configured as VP0A + McASP mode, of which VP0A is configured as 8-bit BT. 656 video input, which is used to connect one video input. TVP5150PBS is a high-performance video encoder that converts the NTSC / PAL analog signal output from the video signal analog camera into a digital color-difference signal (YUV4: 2: 2). The output format is ITU-R BT. 656.
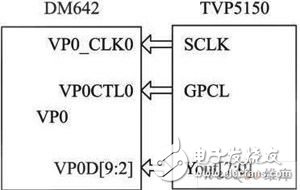
Figure 2 Block diagram of video acquisition hardware.
2. 2 Audio signal collection
Figure 3 is the audio input block diagram, BCLK is the bit clock, LRC IN and LRCOUT are the frame synchronization input and output, and D IN and DOU are the audio input and output, respectively. McASP is simultaneously connected to 4 audio inputs and outputs. McASP is set to burst frame synchronization mode in the system. TLC320A IC23B is an audio encoding device that supports microphone, stereo input and stereo output. According to the requirements of G.723 encoding, the electrical signal input by the microphone is 8 K sampled by TLC320A IC23B and 16-bit quantized. TLC320A IC23B uses DSP mode to exchange data with McASP.
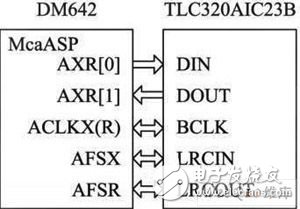
Figure 3 Audio acquisition hardware block diagram.
2. 3 GPS signal acquisition
Figure 4 is a block diagram of GPS signal acquisition. TX and RX are serial data sending and receiving signals, respectively. TL16C752B adopts 8-bit asynchronous walking memory interface, supports baud rate up to 1 Mbyte / s, connects with DM642's external memory EM IFA, address A 2 A0 is used to address 8 registers of TL16C752B. The MAX3160 is a multi-protocol transceiver that can configure the serial port interface level to various interface level standards such as RS232 / RS422 / RS485. The GPS acquisition module uses Ho lux M-89, which has a sensitivity of 159 dBm, supports NMEA0183 data communication protocol, and its positioning accuracy is less than 3 m, which is higher than the S iRF chip. Therefore, in addition to being able to complete high-speed mobile positioning, it is more suitable for walking Wait for low speed positioning.

Figure 4 GPS acquisition hardware block diagram.
2. 4 Network data transmission
The network data transmission connection diagram is shown in Figure 5. The network interface of DM642 is multiplexed with PCI and HPI. B3 and B10 in the system via PCI bus are configured as HPI16 + Ethernet interfaces. The Ethernet interface is composed of two parts: EMAC (data path of the network) and MD IO (state and control interface of EMAC). The system uses BCM5221 from Broadcom as the transceiver (physical layer) of 10 / 100M Ethernet.
To achieve wireless network transmission, a 3G router and wireless network card are used to transmit data through the EVDO network. The 3G router uses Tenda's 3G611R, which is compatible with three 3G networks: EVDO, HSPA, and TD HSDPA. The wireless network card adopts ZTE's AC2746. The card supports downlink 3.1 Mbit / s and uplink 1.8 Mbit / s.
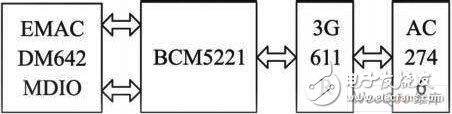
Figure 5 Network transmission hardware block diagram
3 System software design3. 1 Overall flow chart
Figure 6 is the system software flow chart. In order to realize the real-time transmission of the network and ensure the later positioning video and audio processing, G. 723.1 audio compression coding and H. 264 video compression coding are used in the system. GPS data only retains the four data of longitude, latitude, time and elevation. Used for post-processing. Since the encoding of G. 723 is one frame every 30 ms, in order to achieve synchronization of video, audio and positioning information, the GPS interval is also set to 30 ms, and the actual GPS refresh rate is 1 time / s, so the interpolation of latitude and longitude is required. Way to match GPS positioning information with video images. In order to compress the video rate to realize wireless real-time playback and realize the synchronization of video and audio, the video encoding is set to 90ms per frame, and the corresponding relationship between video and audio encoding is 1: 3.
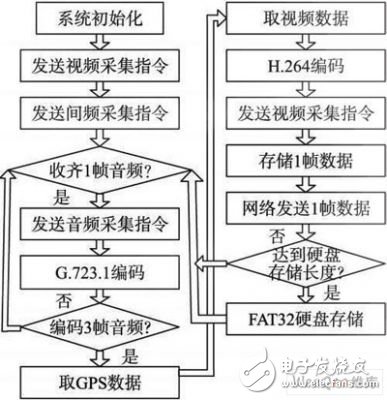
Figure 6 System software flow chart
3. 2 GPS data collection
The system uses the query method to read the GPS data in TL16C752B. Because GPS data is sent cyclically, the TL16C752B cache resources are used in the software design, and the discontinuous extraction scheme is used to reduce the occupation of DM642. Since the GPS data transmission rate is set to 4 800 Baud, the TL16C752B cache is 64 bytes, so as long as the GPS data in the TL16C752B is read at a time interval of less than 133ms, the GPS data coverage can always be avoided. Since the time to encode 3 frames of G.723.1 audio is 90ms, which is less than 133ms, the GPS data is read once every 90ms, and a set of GPS data can be completely read after 11-12 times.
3. 3 Audio and video data collection and coding
The collection of audio data is done by McASP, the length of the collection buffer is set to 480 bytes, the collection rate is set to 8 kHz, the number of quantization bits is set to 16 bi, t ​​will return a sign that the collection buffer is full every 30 ms, pass Querying and reading this mark can realize the lossless collection of audio data. The video data collection is completed by EDMA. After sending the video collection instruction, EDMA completes moving the original video data collected by the video to the designated memory. Therefore, the collection of video and audio data will not occupy the resources of DM642. The audio codec of G.723.1 is transplanted and optimized for use by the ITU T reference program. The optimized encoding time of G.723.1 after testing is less than 5ms.
H264 video encoding uses Seed's H264 library, which supports C IF (352 * 288) 100 kb it / s to 800 kbit / s encoding rate, D1 (704 * 576) 500 kbit / s to 4 000 kbit / The encoding rate of s. In the program, the hard disk storage adopts D1, 2.4M encoding, network transmission adopts C IF, 300 kbit / s encoding, the tested CIF encoding time is less than 5m s, and the D1 encoding time is less than 11m s.
3. 4 Hard disk data storage
The hard disk operation mode adopted in the system is the direct input and output mode (PIO). In order to prevent each frame from saving too long system time, the save task adopts the save buffer scheme. When the buffer data is large enough, the hard disk operation is performed. . In order to prevent the hard disk file from being too large and exceeding the storage range of FAT32 (less than 4 Gbyte), the scheme of rebuilding a file connected by serial number is adopted when the stored file is larger than 800MB. After testing the hard disk read and write speed can reach up to 11. 8Mbyte / s, so it can fully meet the requirements of the system storage speed of about 3Mbyte / s.
3. 5. Network data transmission
The network operation in the system uses TI's NDK library, which supports common network protocols such as TCP, UDP, and HTTP. The processing capacity of the library is 1.66 processing cycles per bit / s. Calculated at an average transmission rate of 300 kb it / s, each frame requires 492 k processing cycles. The operating rate of DM642 in the system is 600 MH z. The average sending time per frame is 0.82 ms. In order to achieve real-time playback, the system uses UTP protocol to transmit encoded data, and TCP protocol to transmit network control commands.
4 Test results and conclusionsFig. 7 is a graph showing the real-time transmission to the server in the vehicle-mounted environment and displaying it. The system test uses walking and vehicle modes. The walking route is from Gate 1 to Gate 3 of Nanjing Normal University, and the walking speed is 5 km / h. The vehicle route is from Gate 1 of Nanjing Normal University to Zhongbei Campus. The vehicle speed is 60 ~ 80 km / h, the network transmission adopts Jiangsu Telecom's EVDO network. The test proves that the collector can collect and store positioning video and audio data very well, and it can transmit real-time transmission of positioning video and audio data through the EVDO network in pedestrian and vehicle environments.
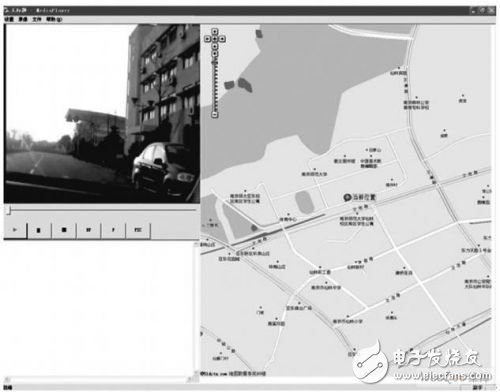
Figure 7 Test result graph
This collector implements a live webcast of positioning video and audio, providing a richer and timely geographic information system environment. In addition, the data collected by this collector can provide materials for the construction of real maps and 3D scene maps, and can also achieve video and audio segmentation and retrieval based on geographic positioning information, which will greatly enrich the application of geographic information systems.
Off-grid, home energy storage, back-up, UPS,Home Series,Home battery series,HomeKit, renewable energy, hybrid system,household
Shenzhen Enershare Technology Co.,Ltd , https://www.enersharepower.com