![<?echo $_SERVER['SERVER_NAME'];?>](/template/twentyseventeen/skin/images/header.jpg)
In recent years, with the development of robot technology and control technology, robots have been widely used in daily life and industrial and agricultural production. The robot object is a nonlinear, strongly coupled multivariable system during motion. It is also a time-varying system due to uncertainties such as friction and load changes. The traditional robot control technology is mostly based on the model control method. The satisfactory trajectory tracking effect fuzzy control and the development of artificial intelligence such as neural network are not provided to solve the problem of robot trajectory tracking. The control rules of ordinary fuzzy control are mostly the summary of people's experience. The ability to not have self-learning and self-adaptation is often influenced by subjectivity. Therefore, the system with time-varying uncertainty cannot be well controlled.
In recent decades, fuzzy systems based on fuzzy logic development have become very active fields. Some algorithms have shown considerable capabilities in controller design for complex systems, and fuzzy mathematical theory has also provided extreme Superior tools.
Because the neural network has good self-learning, self-adaptation, association and other intelligence, it can adapt to the complex and varied dynamic characteristics of the system. The combination of fuzzy control and neural network has become the focus of scholars' research. Research in this area originated in Europe and the United States, but in the late 1980s it achieved relatively large development in Japan. At present, in the field of knowledge and information processing, he has reached a unique research stage independent of fuzzy logic and neural network technology. The combination of fuzzy and neural network technology has the shortcomings of neural network and fuzzy logic in knowledge processing. It has functions such as data supervised learning, processing experience knowledge and online learning based on language expression. The fuzzy control is adjusted by using neural network nonlinear mapping and self-learning ability. The fuzzy control has certain adaptive ability, and also makes the neural network obtain the inductive ability of fuzzy control. In this paper, the application of fuzzy neural network in robot control is studied, and a fuzzy neural network robot trajectory tracking control is proposed. The simulation results show that the control method can track the robot trajectory well.
Robot control system establishment
In this system, the stereo positioning system is used as the main data input channel for accurately obtaining the precise relative position between the target position and the robot. These live real-time spatial information is then incorporated into the previously established spatial model. During the period, it is necessary to determine the relationship between the former model and the actual three-dimensional space transformation, that is, registration.
Then, the robot performs the motion operation according to the exercise plan formulated by the computer-aided system. During the movement, the stereo positioning system performs visual control by continuously collecting the position of the robot and the target space in combination with the robot multi-axis controller. The robot control system is shown in Figure 1. The input voltage in the block diagram is the feedback current of the robot driving the servo motor, and the output is the walking speed of the robot, which is realized by the servo speed.
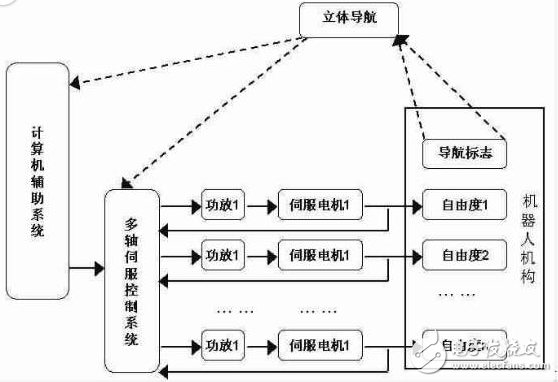
Figure 1 Robot Control System
The robot designed in this paper is a six-degree-of-freedom robot: three rotations and three translations. The six degrees of freedom of the robot work together to complete the space motion. Considering that the designed robot belongs to a small robot, it is desirable to minimize the weight. In this way, it is required to limit the overall load of the mechanism due to the decrease in rigidity, and also consider the stability of the mechanism at high speed. Moreover, the stiffness design of the multi-degree of freedom mechanism depends on the speed and direction of motion.
Fuzzy neural network
2.1 Control system structure
The structure of the control system is constructed in conjunction with the robot positioning system. As shown in Fig. 2, the position of the robot is taken as the controlled amount.
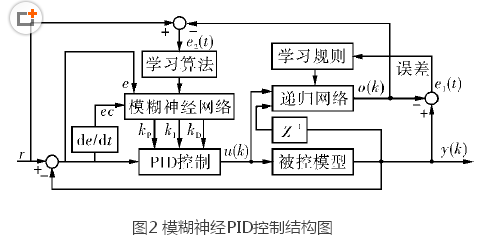
In the figure, e and ec are the error and error change rates respectively, the input r is the robot position, and the output y is the actual output of the robot.
2.2 Structure of fuzzy neural network
The fuzzy neural network is 4 layers, as shown in FIG. The first layer is the input layer; the second layer is the fuzzy layer; the third layer is the fuzzy inference layer; the fourth layer is the output layer. The fuzzy neural network structure is 2–6–6–3.
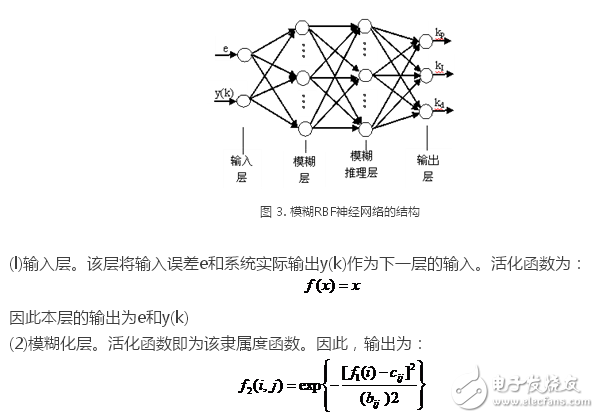
Where i=l,2;j=l,2,. . .6. Cij and bij are the mean and standard deviation of the membership functions of the jth fuzzy set of the i-th input variable of the Gaussian function, respectively.
(3) Fuzzy reasoning layer. The amount of blur in the upper layer is multiplied by two to two to obtain the output value of this layer. Therefore, the activation function of this layer, ie the output is:
2.3 Robust controller
To ensure the stability of the closed-loop system and good control effects, the real-time controller consists of a fuzzy neural network controller NNC and a robust controller RC. The output signals of these two controllers are combined by weighting as the control input of the system [8-10] to form a variable robust controller u(k):
System simulation study
In order to verify the effectiveness of the proposed fuzzy neural network control algorithm, a fuzzy neural network is created in MATLAB, and the abstract fuzzy rules are transformed into fuzzy neural network training samples by using membership functions and fuzzy rules. The hidden layer can be used at any point. Tansig acts as a transfer function, and the output layer uses a commonly used non-negative Sigmoid function.
The response curve of the system step signal when using conventional PID control and fuzzy neural network control. Figure 3 shows the error response curve of the sinusoidal signal tracking by the conventional PID controller and the fuzzy neural network controller. By comparison, the fuzzy neural network controller is superior to the conventional PID controller in terms of dynamic performance, and the sinusoidal response error can be reduced from 0.02. Rad dropped to 0.001 rad.
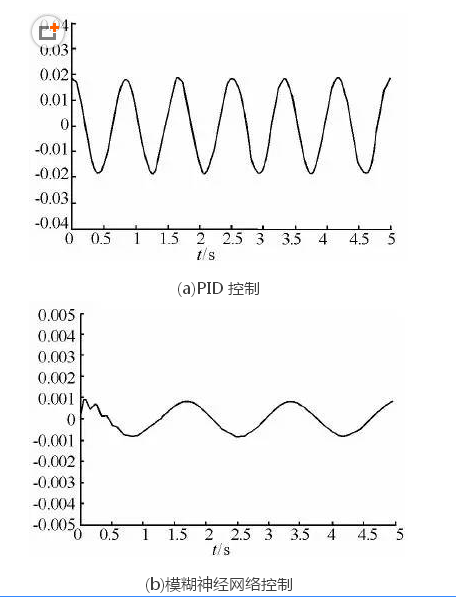
Figure 3 system sinusoidal error response curve
in conclusion
In this paper, fuzzy control and neural network are combined to design a robot position control system based on fuzzy neural network, and it is applied to the robot trajectory tracking control system. The simulation results show that the control system can effectively overcome the influence of nonlinearity and coupling in the robot system, and it is a good control method.
Connector Cable, waterproof connector cable, cable harness, led light connector cable, IP68 waterproof connector
Connector Cable, waterproof connector cable, cable harness, led light connector cable, IP68 waterproof connector
Ningbo HanCheng(HC) Electronic Co.,Ltd , https://www.hcwires.com